Test des capteurs
Après avoir modifié le code avec la nouvelle librairie citée précédemment pour les capteurs ultrasons, et ça marche beaucoup mieux, j'ai procédé à quelques essai de détection des obstacles. Reste à faire certaines modifs et surtout intégrer dans le code la gestion du dilemme du coin!
C'est la reprise!
Bientôt la reprise de conception de cutflower2 avec de nouvelles idées plein la tête!
J'étais occupé avec la maison! Je suis impatient!
@ bientôt. !
Essai terrain...
J'ai fait un essai terrain pour voir le comportement du robot, malheureusement, ce test n'a pas été concluant, car le temps de réaction du robot est beaucoup trop long. Après vérification, le loop boucle en 0.8s aie aie!!
C'est due au temps de retour du ping de chacun des ultrasons...
J'ai trouvé sur le net, une modification de la librairie afin de pouvoir régler sois même la distance max efficace et ainsi ne pas perdre de temps à "écouter" pour rien... Avec cette nouvelle version, le loop est passé à 0.15s!!
Pour la petite histoire, à force de bricoler sur le robot, j'ai un peu oublié que c'était une tondeuse pendant l'essai, et je me suis présenté sur son coté pour simuler un obstacle en diagonale, vu son temps de réaction, elle ne m'a pas vu et elle m'a rouler sur le pied tout en coupant ma basket neuve par la même occasion ! Mon pied a eu très chaud, mais les lames coupent très bien !!!

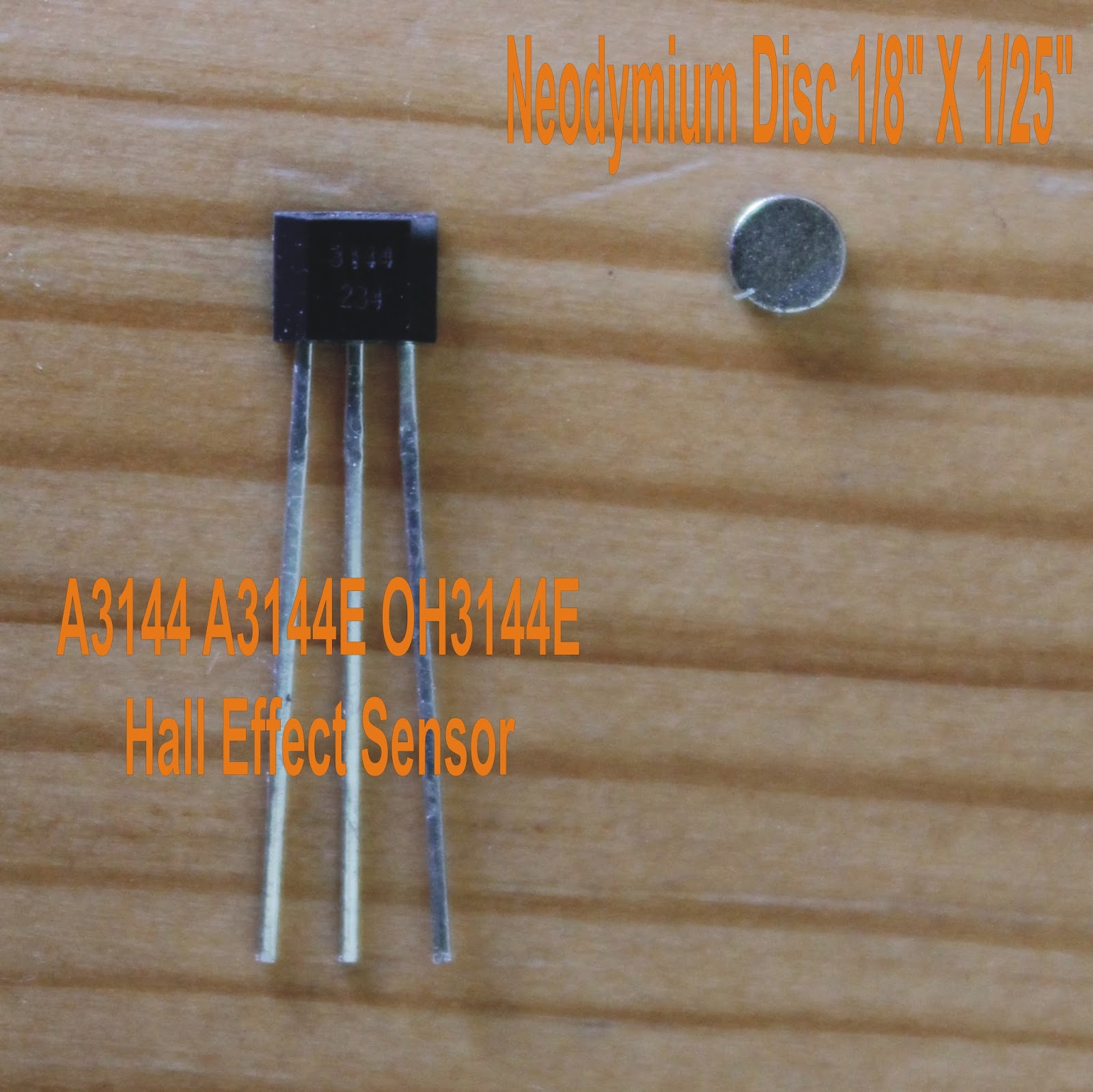
Capteur à effet hall...
Installation de capteurs à effet hall et d'aimants sur chaque disque de coupe afin d'asservir les 3 moteurs brushless. Objectifs: réguler la vitesse en fonction de la difficulté rencontré pour la coupe de chacun des disques et permettre au programme de relancer un démarrage si un moteur cale par bourrage.





Code provisoire pour tester la régulation des moteurs de coupe:
/* Senseur à Hall Effect
Le circuit:
* Le senseur Effet Hall
Pin 1: +5v
Pin 2: Masse/GND
Pin 3: +5V via une résistance pull-up de 10 KOhms
*/
#include "Servo.h"
long timeRef=0; // variable pour temps de référence en millisecondes
long tps_comptage=1000; // variable pour délai de comptage en millisecondes
long timeRef2=0; // variable pour temps de référence en millisecondes
long tps_comptage2=10000; // variable pour délai de comptage en millisecondes
volatile long comptageImpuls_G=0;
volatile long comptageImpuls_M=0;
volatile long comptageImpuls_D=0;
const int ledPin = 13;
const int BRUSHLESS_M=38;
const int BRUSHLESS_G=36;
int sensorValue;
Servo cont_brushless_G;
Servo cont_brushless_M;
Servo cont_brushless_D;
int tourmin = 5000;
int vit_lame_G=140;
int vit_lame_M=140;
int vit_lame_D=140;
void setup()
{
Serial.begin(9600);
Serial.println("DEBUT SETUP");
pinMode( ledPin, OUTPUT );
cont_brushless_D.attach(BRUSHLESS_D);
pinMode(BRUSHLESS_D, OUTPUT);
cont_brushless_M.attach(BRUSHLESS_M);
pinMode(BRUSHLESS_M, OUTPUT);
cont_brushless_G.attach(BRUSHLESS_G);
pinMode(BRUSHLESS_G, OUTPUT);
delay (100);
attachInterrupt(4, gestionINT_D, RISING); // pin 19 attache l'interruption externe n°0 à la fonction gestionINT0()
attachInterrupt(3, gestionINT_M, RISING); // pin 20 mode déclenchement possibles = LOW, CHANGE, RISING, FALLING
attachInterrupt(2, gestionINT_G, RISING); // pin 21
DEM_MOT_G();
DEM_MOT_M();
DEM_MOT_D();
delay (1000);
Serial.println("FIN SETUP");
delay (1000);
}
void loop()
{
REG_COUPE();
}
void DEM_MOT_G() //demarrage de la coupe
{
Serial.println("DEM_MOT_G");
cont_brushless_G.write(50); // génère initialisation du controleur
delay (2000); //attente de 2 secondes pour initialisation du controleur
cont_brushless_G.write(vit_lame_G); // génère initialisation du controleur
delay (50);
}
void DEM_MOT_D() //demarrage de la coupe
{
Serial.println("DEM_MOT_D");
cont_brushless_D.write(50); // génère initialisation du controleur
delay (2000); //attente de 2 secondes pour initialisation du controleur
cont_brushless_D.write(vit_lame_D); // génère initialisation du controleur
delay (50);
}
void DEM_MOT_M() //demarrage de la coupe
{
Serial.println("DEM_MOT_M");
cont_brushless_M.write(50); // génère initialisation du controleur
delay (2000); //attente de 2 secondes pour initialisation du controleur
cont_brushless_M.write(vit_lame_M); // génère initialisation du controleur
delay (50);
}
void REG_COUPE()
{
if (millis()>(timeRef+tps_comptage))
{ // si le delai de comptage est écoulé
timeRef=timeRef+tps_comptage; // réinitialise le délai de comptage
//************* BRUSHLESS GAUCHE
Serial.print(comptageImpuls_G*60/2);
Serial.println("tours/mn G ");
if (((comptageImpuls_G*60)/2)>tourmin)
{
vit_lame_G = vit_lame_G-2;
cont_brushless_G.write(vit_lame_G);
Serial.print(vit_lame_G);
Serial.println("vit_lame_G-2");
}
if (((comptageImpuls_G*60)/2)<(tourmin-100))
{
vit_lame_G = vit_lame_G+5;
if (vit_lame_G > 170)
{
vit_lame_G = 170;
}
cont_brushless_G.write(vit_lame_G);
Serial.print(vit_lame_G);
Serial.println("vit_lame_G+5");
}
//************
//************* BRUSHLESS MILIEU
Serial.print(comptageImpuls_M*60/2);
Serial.println("tours/mn M");
if (((comptageImpuls_M*60)/2)>tourmin)
{
vit_lame_M = vit_lame_M-2;
cont_brushless_M.write(vit_lame_M);
Serial.print(vit_lame_M);
Serial.println("vit_lame_M-2");
}
if (((comptageImpuls_M*60)/2)<(tourmin-100))
{
vit_lame_M = vit_lame_M+5;
if (vit_lame_M > 170)
{
vit_lame_M = 170;
}
cont_brushless_M.write(vit_lame_M);
Serial.print(vit_lame_M);
Serial.println("vit_lame_M+5");
}
//************
//************* BRUSHLESS DROITE
Serial.print(comptageImpuls_D*60/2);
Serial.println("tours/mn D");
if (((comptageImpuls_D*60)/2)>tourmin)
{
vit_lame_D = vit_lame_D-2;
cont_brushless_D.write(vit_lame_D);
Serial.print(vit_lame_D);
Serial.println("vit_lame_D-2");
}
if (((comptageImpuls_D*60)/2)<(tourmin-100))
{
vit_lame_D = vit_lame_D+5;
if (vit_lame_D > 170)
{
vit_lame_D = 170;
}
cont_brushless_D.write(vit_lame_D);
Serial.print(vit_lame_D);
Serial.println("vit_lame_D+5");
}
//************
DETECT_ARRET_BRUSHLESS();
comptageImpuls_G=0;
comptageImpuls_M=0;
comptageImpuls_D=0;
} // fin si délai de comptage s'est écoulé
}
void gestionINT_G()
{
comptageImpuls_G=comptageImpuls_G+1;
}
void gestionINT_D()
{
comptageImpuls_D=comptageImpuls_D+1;
}
void gestionINT_M()
{
comptageImpuls_M=comptageImpuls_M+1;
}
void DETECT_ARRET_BRUSHLESS()
{
if (millis()>(timeRef2+tps_comptage2)) //delai comptage X10 pour detection arret moteur
{
timeRef2=timeRef2+tps_comptage2; // réinitialise le délai de comptage
if (((comptageImpuls_D*60)/2)<10)
{
DEM_MOT_D();
}
if (((comptageImpuls_M*60)/2)<10)
{
DEM_MOT_M();
}
if (((comptageImpuls_G*60)/2)<10)
{
DEM_MOT_G();
}
}
}
Ajouter un magnétomètre...
J'ai essayer d'ajouter un magnétomètre sur le robot pour qu'il fasse de belle ligne droite
et une tonte semi intelligente en faisant des parallèles...
1er test avec le hmc5883l, c'est un magnétomètre seul, et vu que le robot ne se
déplace pas sur une surface plate, les valeurs reçu sont inutilisable...
2ème test avec un LSM303DLH, c'est un magnétomètre combiné
avec un accéléromètre, afin de pouvoir avoir des valeurs utilisable sur tous types de terrain...
Facile à calibrer et à programmer, mais lors du test sur le robot, tous les résultats varie, c'est dû
au champ magnétique des moteur de traction! Même en éloignant le capteur des moteurs le capteur s'affole!
Des variations de +/- 20° quand les moteurs de traction sont alimentés...
Impossible d'utiliser ce capteur tant que je n'ai pas trouvé de solution pour blinder les moteurs...


Voici le log du capteur avec et sans les moteurs de traction en marche:

Carter de coupe, suite...
Confection d'un nouveau carter de coupe, et ce coup ci,
sans soudure pour ne pas vriller la tôle inox!!

Fixation des moteurs brushless sur le carter.


Les retours de protection sont en alu fixé par des rivets...





Modification du pare-choc AV
Renforcement du pare-choc avant pour qu'il résiste d'avantage aux chocs !


Inscription à :
Articles (Atom)